Ich bin David.
Product Designer @ Eventfrog.ch, Gadget-Liebhaber und Vater von zwei Töchtern.





Vorneweg: ich bin ein etwas Fortgeschrittener Anfänger, wenn es um RC geht und fliege erst seit Sommer 2016 einen Einsteiger Quadcopter namens Latraxx Alias (welcher sich super eignet um zu Lernen btw). Als mir dieser Mini Racing-Quad von GearBest via Technikblog zur Verfügung gestellt wurde, war die Idee dahinter, dass ich damit als Anfänger ins FPV (First Person View) Fliegen einsteigen und gleich einen Testbericht machen könnte. Voller Vorfreude schaute ich jeden Tag im Briefkasten nach, ob mein Paket endlich ankommt. Denn dieses FPV, das wollte ich unbedingt als Nächstes ausprobieren. Hier mein Bericht:
Es gibt den P130 bei GearBest in 2 Ausführungen: entweder als RTF (Ready To Fly, also fixfertig fliegbar inkl. Fernbedienung) oder als ARF (Almost Ready to Fly). Ich erhielt die ARF-Version, was sich später als eine Herausforderung entpuppte.

Ein Paket, welches über 7000 km hinter sich hat
Doch zuerst zum Lieferumfang als Liste:

Mitgelieferter Inhalt der Verpackung
Was mir zuerst auffiel (nebst dem China-Stecker des Ladegeräts): eine Bedienungsanleitung oder weitere Infos zu den montierten Teilen in dem Quad fehlten komplett. Auch online fand ich keine zum Downloaden. Das war für mich natürlich ein kleiner Schock, war ich mir doch die toll illustrierte Anleitung des Latraxx Alias gewohnt. Anyway, ich versuchte dann als Nächstes herauszufinden, welche Teile denn in dem Quad integriert wurden.
Der Frame des Multikopters setzt sich aus zwei Karbon-Platten zusammen, die Untere ist fette 3 mm dick, die obere 1,5 mm. Zusammengehalten werden die Platten mit 3 Stiften und sind mit Alu-Inbusschrauben verschraubt. An den Enden der vier Armen sind Schaumgummi Stands angebracht, die vor allem die ESCs (Electronic Speed Controllers) bei einer harten Landung schützen, welche unten am Frame angebracht sind.
Die Flycolor 12A ESCs (welche auch 4S Akkus verkraften) sind zusätzlich mit einer Schaumgummi-Matte von unten überklebt. Etwas speziell, dass diese unter dem Frame angebracht sind. Wenn man sich jedoch überlegt, dass ein Racing-Quad die härtesten Schläge im Vorwärtsflug, also mit dem oberen Teil des Frames nach vorne gerichtet einstecken muss, vielleicht gar keine so schlechte Idee.
Der JJPRO P130 wird mit vier 1806 2300Kv Motoren angetrieben, welche dann den Quad mittels 3“ Tri-Blade Propeller abheben lassen. Ich las in anderen Reviews, dass man diese Motoren eigentlich mit 4S fliegen muss, um genügen Kraft rauszuholen.

Hier war ich zuerst verwirrt, da der FC nicht den Spezifikationen der GearBest Website entsprachen. Es war zwar ein Naze32 Controller. Jedoch nicht der NAZE32 SP Racing F3 DELUXE Flight Controller, wie angegeben, sondern offenbar ein älteres Naze32 Rev6 10 Modell (liess ich mir in FB-Gruppen sagen).
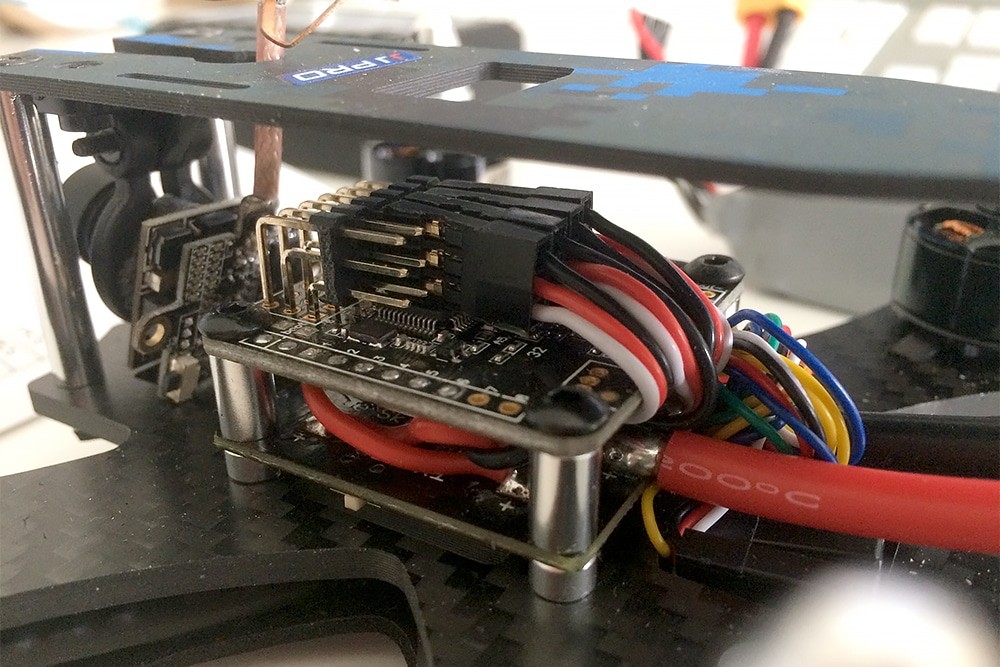
Das Kernstück des Quads: PDB unten und Naze32 Rev6 FC oben
Auf jeden Fall hat der FC einen USB-Micro-Port, über welchen man dann selbst Herr über die Einstellungen des Controllers ist und sich so den Quadcopter entsprechend seinen Wünschen einstellen kann. Der FC hat einen Beschleunigungsmesser, Gyroskop, Kompass und Barometer mit eingebaut. Die zweite Platine unter dem FC ist übrigens das PDB (Power Distribution Board), welches nebst dem FC und den ESCs auch vier LED (hinten Rot, vorne Blau) versorgt.
Unwissend wie ich war, überschrieb ich das vorinstallierte Cleanflight-System mit Betaflight 3.0.1. Dies, weil in verschiedensten YouTube-Reviews und Testberichten offenbar Betaflight die bessere Wahl für Racing-Quads sein soll.
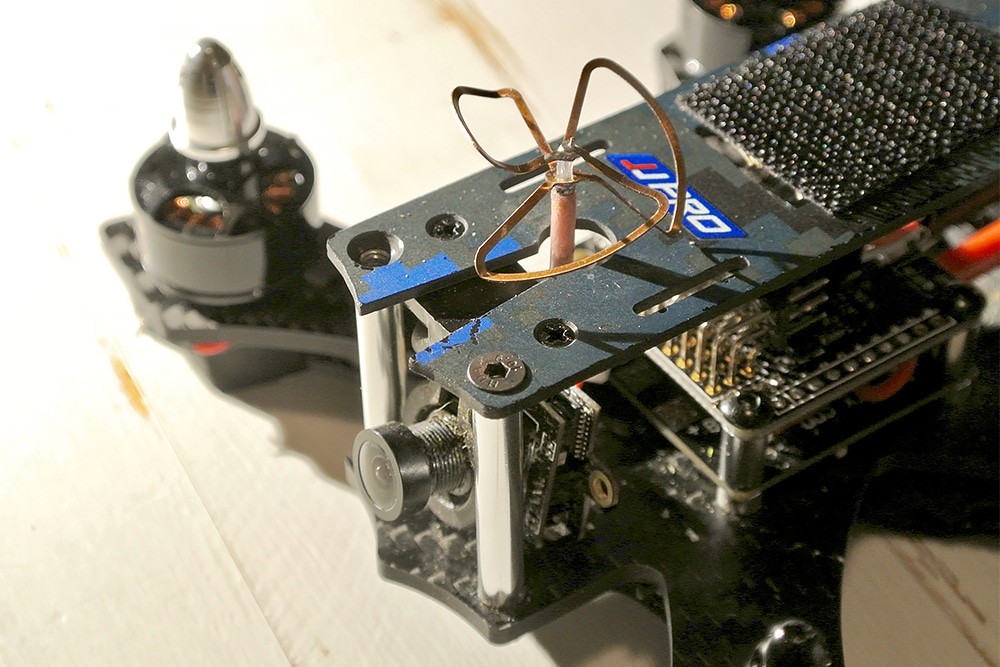
Vor dem Flightcontroller ist ein leicht neigbares 800TVL FPV-Kamera-Sendemodul angebracht, welches 180 Grad Blickwinkel, 40 Sende-Kanäle mit einer Stärke von 25mW drauf hat.
Die Verpackung ist sehr simpel gehalten und kommt eher billig daher. Dass der Karton bei der langen Reise aus China auch gelitten hat, trübte da den Eindruck noch etwas mehr. Gepolstert ist der Inhalt mit einem lieblos wirkenden Schaumgummi Block, aus welchem die entsprechenden Mulden für Quadcopter, Ladegerät, Lipo und Zubehör gefräst wurden.
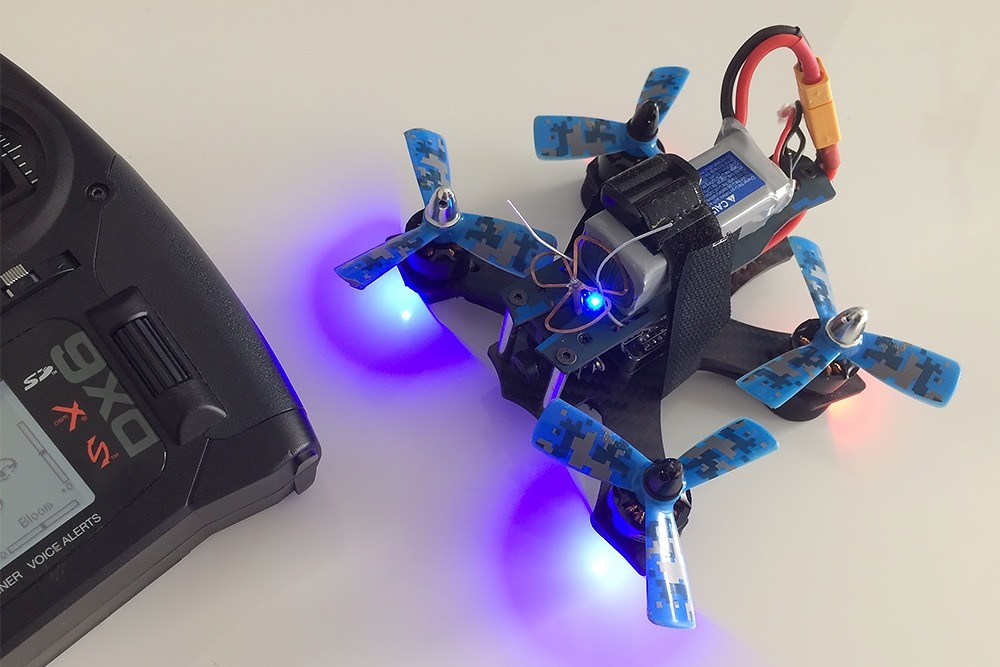
Der P130 Battler selbst ist wirklich recht klein, mit seiner Diagonale von 13 cm. Wenn man ihn in der Hand hält, merkt man aber schon, dass der dicke Karbon-Frame etwas an Gewicht ausmacht. So bringt der Quad mit den Propellern ohne Akku 205 Gramm, mit dem mitgeliefertem Lipo 272 Gramm auf die Waage. Im Vergleich zu meinem Spielzeug-Quad fühlte sich der Racing-Quad gleich sehr erwachsen an und mit montierten Propellern wurde mir sofort bewusst: da halte ich meine Finger besser nicht rein, wenn die Motoren mal an sind.
Die Antenne des FPV-Moduls verunmöglicht starke Neigungswinkel der Kamera und kollidiert mit der Batterie
Und jetzt? Ich wollte natürlich möglichst rasch losfliegen. Doch bei einer Almost Ready to Fly Version heisst es erst Mal: es muss eine Fernbedienung und ein Empfänger her, welchen man mit dem Quad verheiraten muss.
Ich gebe es zu: ich habe zig Stunden verbraten. Naja, ich bin Anfänger und das war mein erster richtiger Racing-Quad. Auch wenn ich unterdessen viel gelernt habe und die technischen Spezifikationen, welche ich oben erwähne, grösstenteils auch verstehe: ich hatte keinen Plan. Zuerst musste mir mal bewusst werden: okay, ich muss da nebst der Fernbedienung auch einen Empfänger auftreiben. Nur: nach was muss ich suchen? Welcher muss ich kaufen? Passen alle zu diesem Flightcontroller etc.
Stunden später, dank Hilfe von einem erfahrenen FPV-Piloten, Mr. Technikblog hier und einer Anleitung im Netz, habe ich mir dann eine Spektrum DX6 Fernbedienung via Ricardo ersteigert und einen Spektrum Racecopter Empfänger mit Diversity SPM4648 bei Brack.ch bestellt.
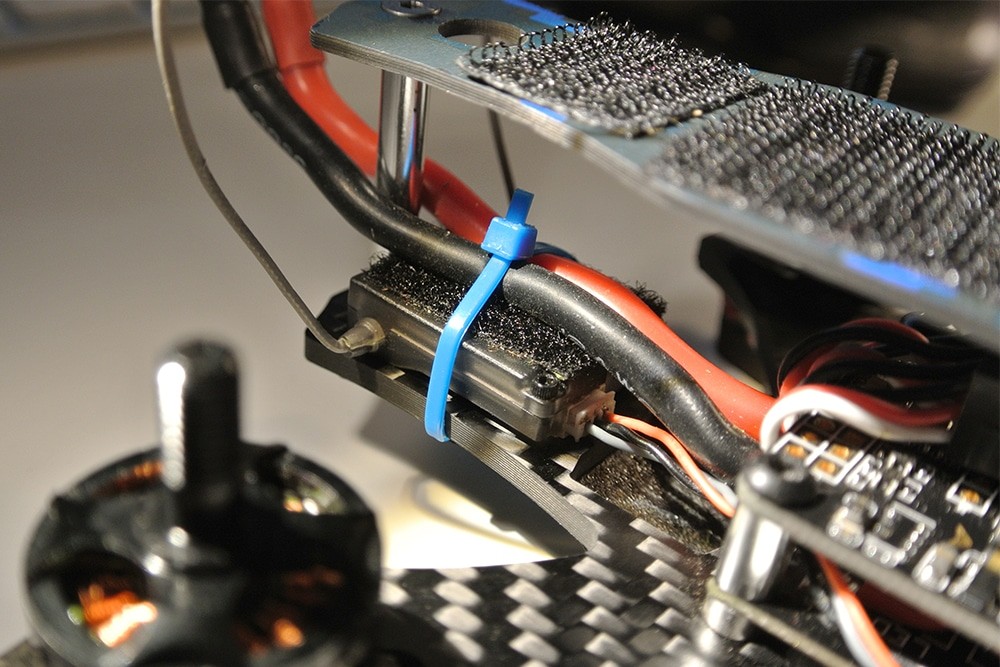
Montierter Spektrum Empfänger. Die Antennen habe ich nachträglich noch mit Schrumpfschläuchen gefixt und festgezurrt
Fast-Forward um Tage und Stunden: ich brachte es fertig, den Spektrum Empfänger an der richtigen Stelle auf den Flugcontroller zu löten und ihn mit der Fernbedienung zu binden. Wieder Stunden später konnte ich auch alle Einstellungen in Betaflight so konfigurieren, dass der P130 auch das tat, was ich in der Fernbedienung eingab. Sprich: Arming (Motoren ein/aus) auf einen Switch. Angle Mode, Horizon Mode und Rate/Acro Mode auf einen anderen Switch, sowie Low-/Highrates auf einen dritten Switch. Gar nicht so einfach. Denn die Spektrum-Fernbedienung ist auch eher für Profis und hat gefühlte hunderttausend Einstellungsmenus.
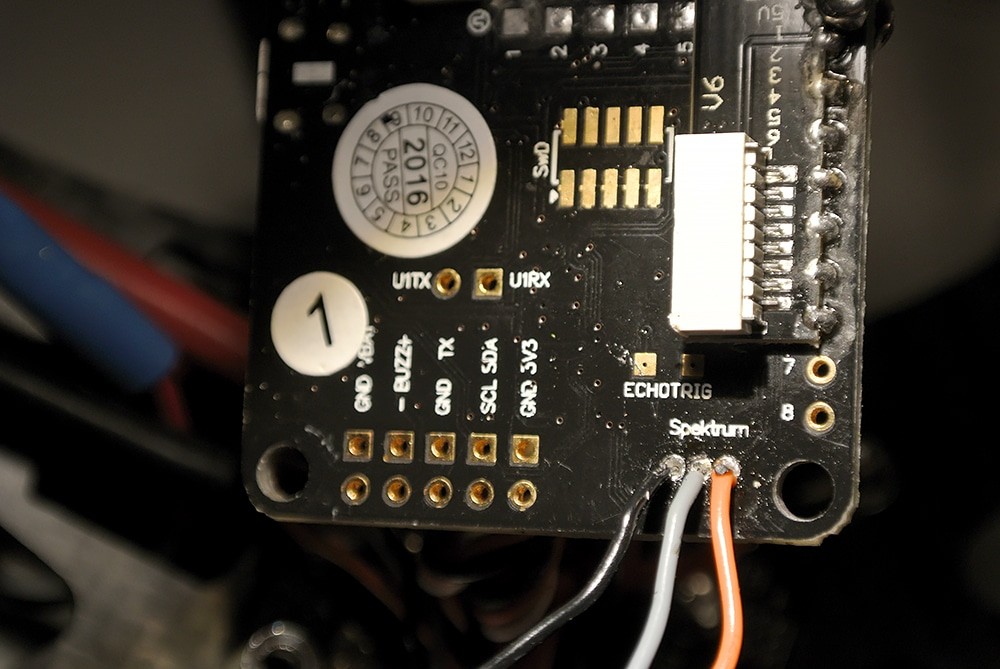
(Anfängermässig) angelötete Kabel des Spektrum Empfängers
Als ich dann zum ersten Mal den Arming-Hebel umlegte und die Motoren zu surren begannen, schrie ich fast vor Freude. Oder war es Erleichterung?
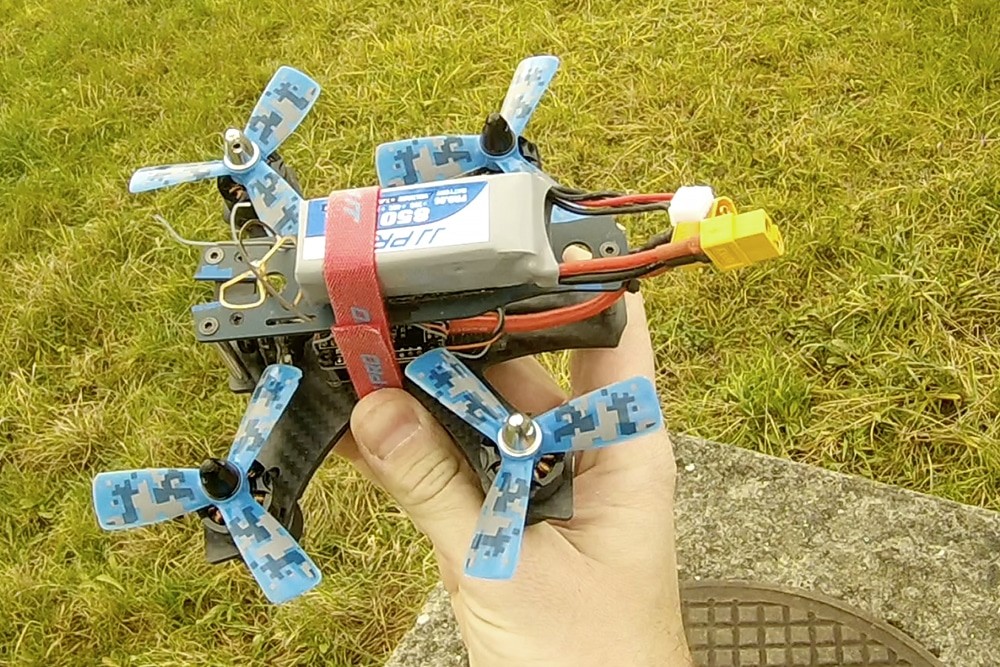
Ich staunte, wie einfach und stabil sich der P130 auf Anhieb fliegen liess. Natürlich startete ich im Angle Mode (also mit Self-Level Unterstützung des Flightcontrollers). Doch das machte schon gleich sehr viel Spass und der Punch (Vollgas von 1 m über Boden auf 100 m) fand ich gar nicht mal so übel. In anderen Reviews wurde dieser bemängelt. So wie auch das leichte Kippen nach hinten beim Start, welches davon führt, dass die Batterie wegen der FPV-Antenne nicht über dem Gleichgewichtspunkt montiert werden kann, sondern leicht dahinter. Doch weder dieses Phänomen, noch beim Punch hatte ich aus meiner Laien-Sicht was zu bemängeln. Vielleicht liegt das auch daran, dass da Betaflight eine bessere Aufgabe als Cleanflight macht, wer weiss.
Ich drehte also ein paar Runden im Sichtflug, die Flugzeit lag bei etwa 3 Minuten mit der mitgelieferten Batterie. Allerdings bei kalten Wintertemperaturen. Hui, der Quad war wirklich schnell zu dem, was ich bisher geflogen bin. Automatisch flog ich viel angespannter, da ein Crash oder falsches Manöver ganz andere Ausmasse hatte als gewohnt. Auch ein paar Flips versuchte ich im Horizon und Acro Mode. Diese waren jedoch eher lahm, da die Standard-PID-Settings aus Betaflight nicht wirklich passten zum P130 und ich wie gesagt kaum Übung darin hatte. Doch da wäre sicher Einiges rauszuholen. Insgesamt fühlte sich der Quad eher wie ein rasant fliegender Backstein, denn ein agiler Racing-Kopter an (obwohl ich da noch nicht wirklich Vergleichbares geflogen bin).
In einem weiteren Versuch, flog ich dann zum ersten mal FPV. Damit ich das überhaupt konnte, brauchte ich natürlich auch eine FPV-Brille. Hier wurde mir die RC–007 Goggles von GearBest zur Verfügung gestellt. Diese sitzen mir sehr bequem im Gesicht, ich kann sie sogar mit meiner Brille an tragen. Das mitgelieferte 1650 mAh Akku-Pack lud ich easy via USB auf, die Video-Verbindung zum P130 klappte auf Anhieb problemlos. Ich fand das Bild recht klar in den Farben und Kontrastumfang, allerdings ist es schon ein wenig verschwommen, da der 480 x 272 Screen via Fresnel-Linse aufgeblasen wird. Zudem hatte ich indoor das Problem, dass ich manchmal das Gefühl hatte, nicht frontal in den Bildschirm zu schauen, was zu einem matten Bild geführt hat. Outdoor hatte ich keine Probleme damit und eine gute Sicht.

Die RC-007 FPV Goggles
Jess, das war geil. Das erste Mal FPV. Natürlich dauerte es nicht lange, da hing der Quad schon in einem Baum. Doch den Crash überlebte der P130 ohne Probleme und ich flog eine weitere Runde. Hier merkte ich, dass das Video-Signal vor allem Mühe hatte, wenn ich von mir weg flog, da offenbar die Batterie und der Karbon-Frame in diesem Winkel die Übertragung verdeckten. So hatte ich bereits bei ca. 100 Meter Blackouts im Bild. Aber ob das zusätzlich auch an den eher schwachen 25mW des Video-Transmitters lag oder an der sehr bescheidenen Antenne, wage ich nicht festzulegen.
Leider habe ich es nicht mehr hingekriegt, ein besseres Video des Flugverhaltens aufzunehmen, da ich bei späteren Versuchen Probleme mit dem Binden des Spektrum-Empfängers hatte. Hier ein paar Zusammenschnitte meiner ersten Flugversuche und Crashes (auf Sicht geflogen, nicht FPV):
Der Testbericht ist länger geworden, als es der JJPRO P130 wohl verdient hätte. Er folgt dem Trend von kleineren Mini-Quads. Ist allerdings von der Frame-Geometrie her nicht optimal zu Ende gedacht und ist bei dem Preis auch nicht mit den besten Komponenten ausgestattet. Auf jeden Fall rate ich für Anfänger von der ARF-Version ab und kann mir vorstellen, dass man mit der RTF Version des P130 mehr Flug- und weniger Bastelzeit verbringen würde. Allerdings wäre auch dann eher zu einer 4S-Batterie zu raten und besser Betaflight statt Cleanflight mit angepassten PID-Settings zu installieren.
Zusammengefasst würde ich meinen: für Anfänger zu kompliziert (ohne Bedienungsanleitung oder Hinweise, wie der Receiver anzubringen ist), für Fortgeschrittene zu träge im Flugverhalten.
Product Designer @ Eventfrog.ch, Gadget-Liebhaber und Vater von zwei Töchtern.





