Ich bin Hans.
Im März 2010 habe ich Technikblog ins Leben gerufen. Seither blogge ich über technische Themen die mich faszinieren und im Alltag begleiten. Das sind Themen wie Gadgets, Smart Home, Elektroautos, Erneuerbare Energien und vieles mehr...





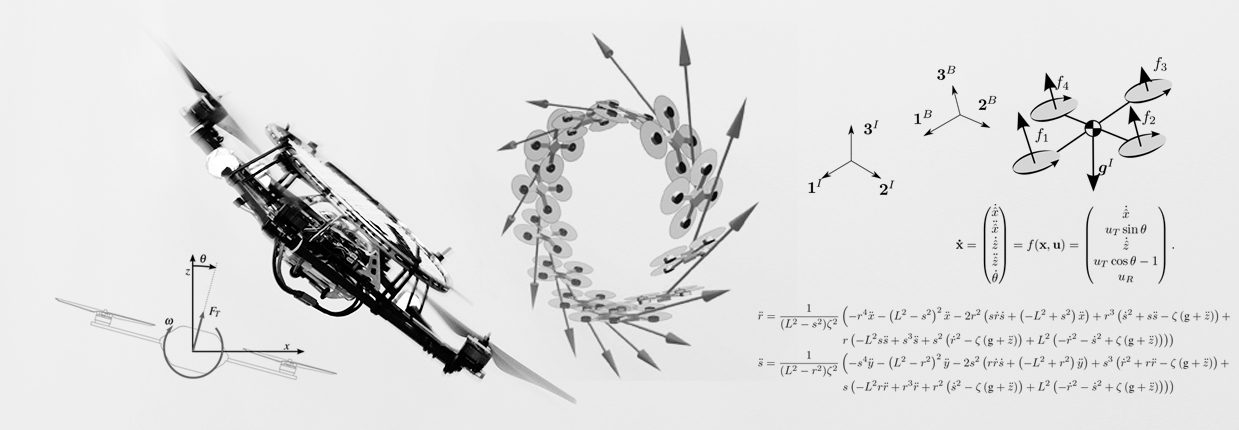 Bisher war ein grosser Vorteil von Oktocopter, dass bei einem Motorausfall das Fluggerät trotzdem noch in der Luft bleibt und «sauber» gelandet werden kann. Das ist ein enormer Vorteil wenn auch noch teures Kameramaterial verwendet wird. Quadrocopter zum Beispiel aber stürzen bei einem Ausfall eines Motors kläglich ab. Die ETH Zürich hat am Institute for Dynamic Systems and Control einen Failsafe entwickelt, der den Copter trotzdem noch in der Luft halten kann, wenn auch einer der vier Rotoren nicht mehr läuft. So kann noch eine weiche Landung durchgeführt werden, um das Materiel zu schützen. Genial, ich freue mich wenn der Algorithmus in kommerziellen Produkten Einzug erhält.
Bisher war ein grosser Vorteil von Oktocopter, dass bei einem Motorausfall das Fluggerät trotzdem noch in der Luft bleibt und «sauber» gelandet werden kann. Das ist ein enormer Vorteil wenn auch noch teures Kameramaterial verwendet wird. Quadrocopter zum Beispiel aber stürzen bei einem Ausfall eines Motors kläglich ab. Die ETH Zürich hat am Institute for Dynamic Systems and Control einen Failsafe entwickelt, der den Copter trotzdem noch in der Luft halten kann, wenn auch einer der vier Rotoren nicht mehr läuft. So kann noch eine weiche Landung durchgeführt werden, um das Materiel zu schützen. Genial, ich freue mich wenn der Algorithmus in kommerziellen Produkten Einzug erhält.
(Bildquelle: flyingmachinearena.org)
Im März 2010 habe ich Technikblog ins Leben gerufen. Seither blogge ich über technische Themen die mich faszinieren und im Alltag begleiten. Das sind Themen wie Gadgets, Smart Home, Elektroautos, Erneuerbare Energien und vieles mehr...





