Ich bin Hans.
Im März 2010 habe ich Technikblog ins Leben gerufen. Seither blogge ich über technische Themen die mich faszinieren und im Alltag begleiten. Das sind Themen wie Gadgets, Smart Home, Elektroautos, Erneuerbare Energien und vieles mehr...






Ich habe euch bereits von meinem Multicopter Projekt berichtet, im ersten Bericht ging es noch um die Anforderungen und Auswahl der Komponenten. Mittlerweile ist mein Hexacopter bereits flughäfig und hat die ersten Testflüge hinter sich. Dieser zweite Teil der Doku soll euch einen Einblick in den Zusammenbau und die Konfiguration des DJI F550 geben:
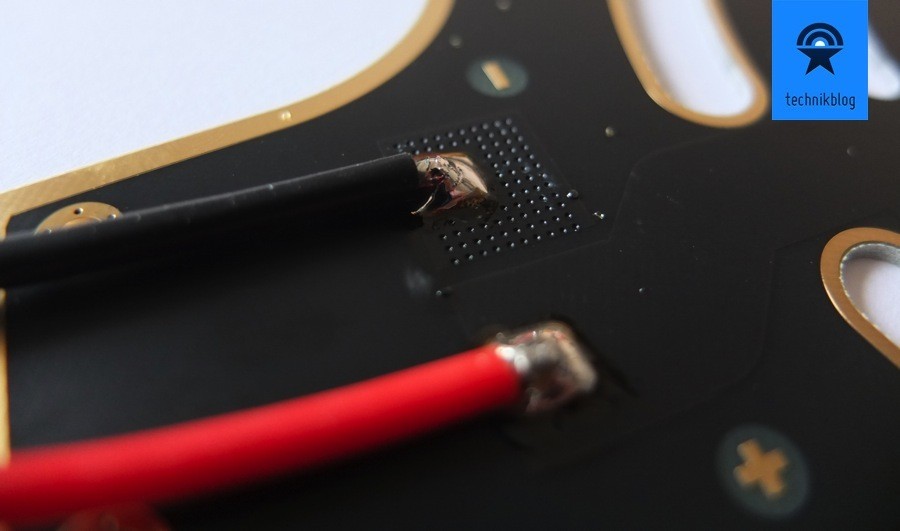
Als erstes habe ich einmal den DJI F550 Bausatz in Angriff genommen. Dieser besteht aus zwei Centerplatten und 6 Armen die daran befestigt werden. Die untere Centerplatte dient dabei auch gleich aus elektrischer Verteiler, daran werden die Motorcontroller-Speisung und das Stromkabel zum LiPo angeschlossen.
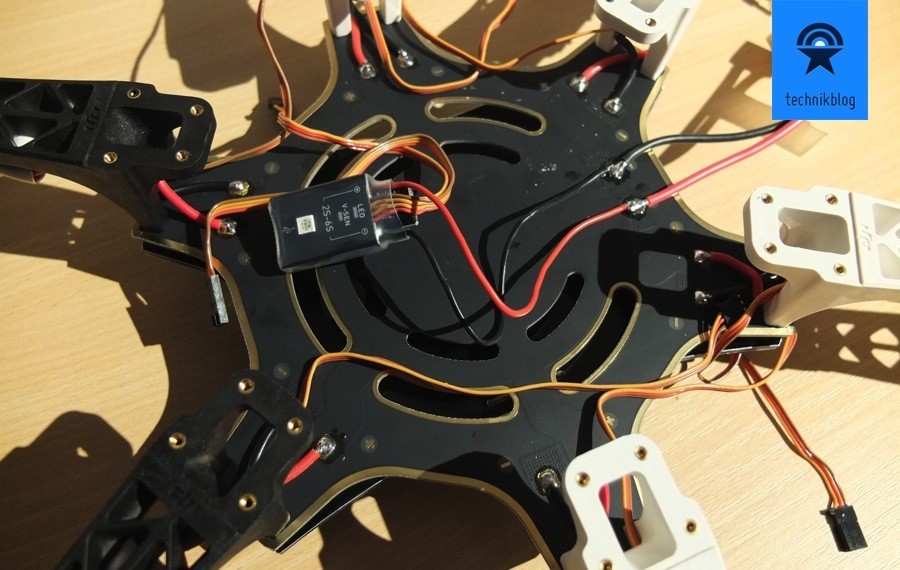
Auch die NAZA-Steuereinheit kann direkt über die Platte gespiesen werden. Nachdem man alle Controller angelötet hat, können die Arme befestigt werden und die Controller daran montiert werden. Das klappt am einfachsten mit Kabelbindern.

An den Enden der 6 Arme gehören die Motoren, die werden anfangs noch ohne Rotoren verschraubt. Die Rotoren sollte man erst nach der Konfiguration anschliessen, damit der Multicopter nicht gleich auf dem Schreibtisch abhebt. Das sieht dann im Schnelldurchlauf etwa so aus:
http://youtu.be/ZIdWx1k77ss
Der Zusammenbau ist anhand der Bauteile grundsätzlich selbsterklärend, ansonsten gibt es noch ein kleines und einfach gehaltenes Manual dazu. Wer schon mal gelötet hat ist sicher im Vorteil, ansonsten gibt es nicht viel spezielles zu beachten. Ich habe vielen Schrauben noch mit Loctite Schraubensicherung angezogen, das soll verhindern dass sich mal eine Schraube durch die Vibrationen lösen sollte.

Zu beachten gilt es dass der GPS-Empfänger des NAZA Systems nicht zu nahe an den Rotoren befestigt wird und gegen oben zeigt, so wie bei meinem Copter gut ersichtlich.
Als erstes habe ich die Fernbedienung Graupner MX-16 gleich mal aufgeschraubt und beim linken Steuerknüppel die Federkraft für die vertikale Steuerbewegung auf Null gestellt. So springt das «Gaspedal» nicht auf 50% ohne Einwirkung. Denn ich fliege die Steuerknüppelbelegung Mode 2, weil mir diese am natürlichsten vorkam. Was die Bewegungsarten Gier, Roll & Nick genau bedeuten, habe ich im Beitrag Wie funktioniert ein Multicopter genauer erläutert.

Steuerknüppel-Belegung Mode 2 – Bild von mikrokopter.de
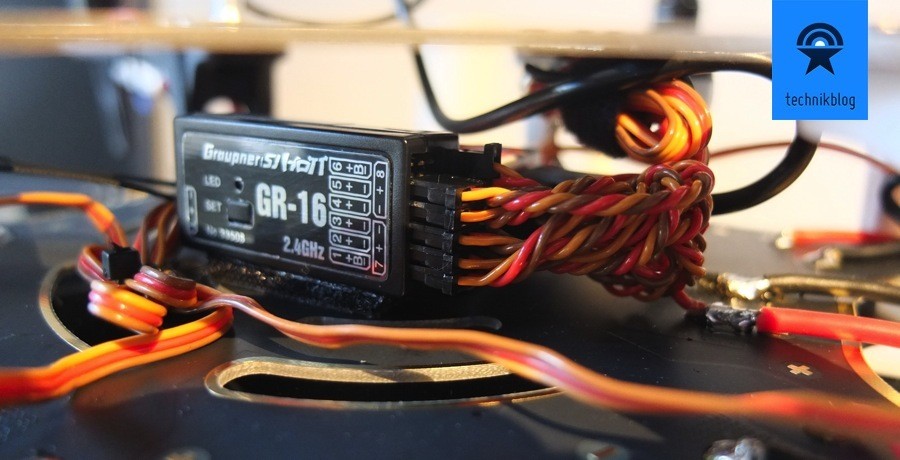
Nun gilt es den Graupner Empfänger, in meinem Fall den GR-16, mit der NAZA, also der Steuerungseinheit des Copters, richtig zu verbinden. Dabei hatte ich anfangs ein wenig Mühe und mittels Google und einigen Foren habe ich mich für folgende Belegung entschieden:
NAZA A - Kanal 2 NAZA E - Kanal 3 NAZA T - Kanal 1 NAZA R - Kanal 4 NAZA U - Kanal 5 (3 Stufen Schalter) NAZA X1- Kanal 7 NAZA X2- Kanal 8
Grundsätzlich kann man die Belegung auch anders legen, man muss dies einfach in der Programmierung berücksichtigen. Zu Erwähnen gibt es vielleicht noch, dass die Fernbedienungen allgemein für Helicopter und Flugzeuge (Flächenmodelle) ausgelegt sind. Für den Multicopter-Gebrauch sollte man sie auf Flächenmodell stellen!
Die Konfiguration der NAZA-Einheit geschieht über ein USB Kabel und einer passenden Software, welche leider nur für Windows erhältlich ist. Dabei werden am Multicopter die Befehle der Fernsteuerung direkt entgegengenommen und an den Computer weitergeleitet, wie erwähnt sollte man die Rotorblätter zu diesem Zeitpunkt noch nicht montiert haben. Die Konfiguration und Kalibration geschieht mit Hilfe einer mehrseitigen Dokumentation zur NAZA. Ich kann hier nur beschreiben, was ich wie programmiert habe. Um das Lesen der Doku kommt man nicht herum, zumal mal ein Fluggerät steuern möchte und es auch verstehen sollte!
Wie oben erwähnt habe ich meinen DJI F550 und die Graupner so konfiguriert, dass ich in Mode 2 fliege. Die Entscheidung finde ich nach einigen Flügen immer noch richtig und fühlt sich natürlich an. Weiter habe ich den drei Positionen-Schalter oben Links (CTRL 9) so gelegt, dass ich darauf zwischen den drei Flugmodis schalten kann, das heisst manuelle Höhe, Altitude Hold und GPS Hold. Auf dem Switch 1, welcher beim Loslassen zurückspringt, kann ich manuell den Failsafe auslösen. Damit fliegt der DJI F550 selbstständig auf 20m Höhe zur Ausgangsposition zurück und landet nach einer gewissen Zeit selbstständig. Auf dem Drehknopf CTRL 7 werde ich dann Pitch & Roll meines Gimbals (Kamerahalterung) anschliessen – dieser Punkt ist noch im Aufbau.

Weiter sind noch folgende Funktionen festgelegt, SW2 = COURSE LOCK, SW3 = HOME LOCK & SW8 = 6 Minuten Timer. Diese Funktionen habe ich bisher noch nicht wirklich ausprobiert, in erster Linie ging es mir darum denn Hexacopter richtig zu konfigurieren und erste Flüge zu machen. Bevor man loslegen kann, sollte man noch die Rotoren befestigen, hier sollte man darauf achten dass diese Abwechslungsweise eine andere Drehrichtung aufweisen und man die linksdrehenden Motoren auch mit linksdrehenden Rotorblättern bestückt.
Eine der meisten Fragen richtet sich immer nach dem Gewicht des DJI F550 Hexacopters. Ich wusste es selbst nie so genau und darum habe ich ihn einmal ausgemessen:
DJI F550 inklusive Elektronik und Landegestellthalterung 1350g
Landgestell Rahmen 120g
3S Conrad LiPo 5000mAh 420g
Einfache GoPro Halterung mit Skeleton Gehäuse 110g
GoPro Hero 2 96g
------
Total Abfluggewicht 2096g
Also rund 2.1kg ist das totale Abfluggewicht des DJI F550 wenn ich einfach und simple eine Hero 2 Kamera montiere. Für zukünftige Pläne wird das Gewicht sicher weiter steigen, wie hoch man gehen kann um noch sicher fliegen zu können weis ich (noch) nicht. 2.5kg sollten aber machbar sein.

Wie der Name Projekt Multicopter es schon sagt, es ist ein Projekt und Projektabschlüsse dauern immer länger als man denkt… Ich habe nun einen flugfertigen Hexacopter mit einer einfachen GoPro-Halterung der mit ersten Flügen viel Spass machte. Doch es gibt einige Punkte die ich noch verbessern und erweitern möchte, die Möglichkeiten sind fast grenzenlos. Die nächsten Ziele aus meiner Sicht sind folgende:
Natürlich gäbe es noch weitere Ziele und Möglichkeiten die ich sehe, doch ich möchte mich in naher Zukunft auf die obigen beschränken.
Die Entscheidung einen Hexacopter zu bauen war definitiv richtig und brachte bisher viel Spass und dabei lernt man auch einiges. Ich muss aber klar sagen, dass ich den Zeitaufwand unterschätzt hatte und dafür aber positiv von den stabilen Flugeinschaften eines Hexacopters überrascht wurde. Ausser zwei kleinen Malheurs beim Landen hatte ich noch keinen Crash oder Schaden zu verzeichnen und das freut natürlich auch den Geldbeutel. Ich halte auch hier auf dem Laufenden und werde demnächst ein kleines Video von ersten Flügen nachreichen.
Im März 2010 habe ich Technikblog ins Leben gerufen. Seither blogge ich über technische Themen die mich faszinieren und im Alltag begleiten. Das sind Themen wie Gadgets, Smart Home, Elektroautos, Erneuerbare Energien und vieles mehr...





