Ich bin Hans.
Im März 2010 habe ich Technikblog ins Leben gerufen. Seither blogge ich über technische Themen die mich faszinieren und im Alltag begleiten. Das sind Themen wie Gadgets, Smart Home, Elektroautos, Erneuerbare Energien und vieles mehr...





 In meinem Multicopter Projekt geht es bekanntlich um den Bau eines Hexacopters, angefangen bei der Planung bis hin zu Foto-Flügen hoch über dem Boden. Dabei habe ich bei Flügen immer wieder Zuschauer und die häufigste aller Fragen bezieht sich auf die Funktionsweise eines Multicopters. Der Titel dieses Artikels könnte auch lauten: Wie funktioniert ein Quadcopter, Hexacopter oder Octocopter – denn die grundsätzliche Funktionsweise haben sie alle gemein. Daher versuche ich das hier gerne näher zu bringen:
In meinem Multicopter Projekt geht es bekanntlich um den Bau eines Hexacopters, angefangen bei der Planung bis hin zu Foto-Flügen hoch über dem Boden. Dabei habe ich bei Flügen immer wieder Zuschauer und die häufigste aller Fragen bezieht sich auf die Funktionsweise eines Multicopters. Der Titel dieses Artikels könnte auch lauten: Wie funktioniert ein Quadcopter, Hexacopter oder Octocopter – denn die grundsätzliche Funktionsweise haben sie alle gemein. Daher versuche ich das hier gerne näher zu bringen:
Quadro, Hexa und Okto steht für die Anzahl Propeller am Multicopter. Diese Diese sitzen in einer Ebene an 4 Auslegern und wirken nach unten, sprich sie erzeugen Schub nach oben. Bei Multicoptern gibt es grundsätzlich 2 verschieden Konfigurationen je nach Anordnung der Rotoren. Zum einen die „H“ oder „X“-Form und zum anderen die „+“-Form. Die Form richtete sich danach, wie die Ausrichtung des Fluggerätes geartet ist. Diese sind im folgenden Bild dargestellt und dabei geht es um die Fluglage. So ist die AR.Drone 2.0 Beispielsweise ein X4, also ein Quadcopter mit zwei nach vorne zeigenden Auslegern. Mein Multicopter Projekt hingegen, entspricht einem X6 Hexacopter, ebenfalls mit zwei Auslegern in Frontrichtung.
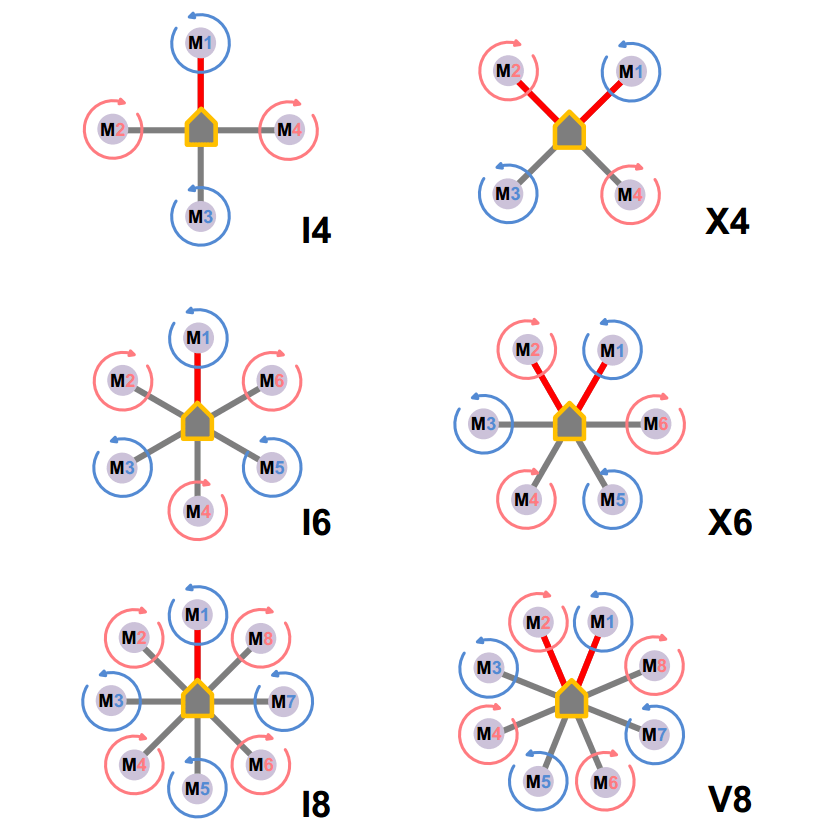
Multicopter Typen Zusammenstellung vom Quad- zum Octocopter
Multicopter besitzen jeweils immer eine gerade Anzahl Rotoren, damit sie stabil in der Luft schweben können. So drehen diese immer in abwechselnder Reihenfolge im Uhrzeigersinn, beziehungsweise Gegenuhrzeigersein. Auch im obigen Bild seht ihr, die Drehrichtung der Rotoren wechselt sich ab. Daher kann wie vorher erwähnt ein Quadcopter auch nur eine gerade Anzahl Rotoren haben, denn immer zwei Rotoren bilden ein entgegengesetzt drehendes Paar. Dadurch heben sich die Drehimpulse der 4 Rotoren auf und so wird das ungewollte Drehen um die eigene Achse verhindert.
Im Schwerpunkt des Copter, meist mittig im Zentrum, platziert man eine Steuerelektronik, in meinem Fall eine DJI NAZA M. Diese beurteilt anhand von Sensoren (Beschleunigung, Gyroskop und auch GPS) die aktuelle Lage und regelt die Rotoren. Diese sind meistens bürstenlose Elektromotoren und haben pro Rotor einen eigenen Controller. Durch unterschiedliche Drehzahlen der Rotoren wird ein Steuerbefehl der Fernbedienung umgesetzt. Nebst dem Steigen, dass durch höhere Drehzahlen erreicht wird, gibt es noch folgende Bewegungen:
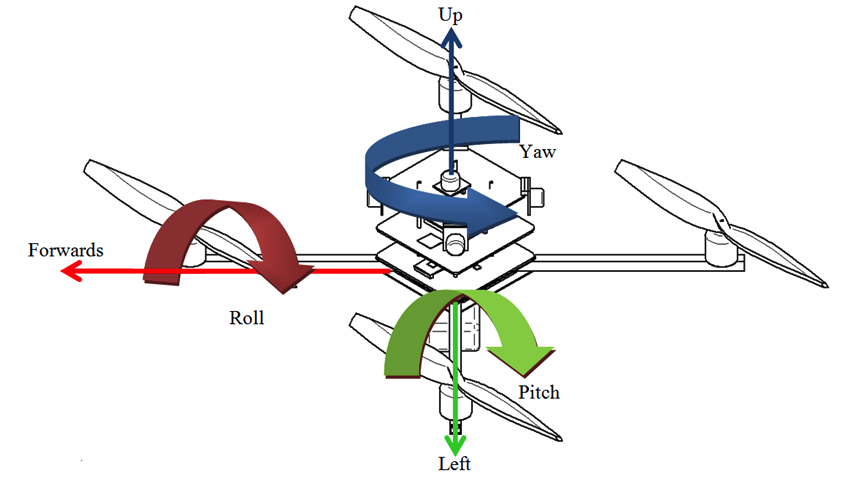
Rollen, Nicken, Gieren anhand eines Quadcopters (Bild von purdue.edu)
Roll-Nick-Gier-Winkel, englisch Roll-Pitch-Yaw-Winkel, sind eine Möglichkeit zur Beschreibung der Orientierung eines Fahrzeugs im dreidimensionalen Raum, die zunächst nur bei Luftfahrzeugen gebräuchlich war, inzwischen aber auch zur Lagebeschreibung von Land-, Wasser- und Raumfahrzeugen Verwendung findet. (Wikipedia)
Rollen steht für die Bewegung nach links und rechts. Dreht sich der rechte Rotor schneller als der linke, so neigt sich der Multicopter nach links und fliegt folgedessen auch in diese Richtung. Umgekehrt natürlich dasselbe, dreht sich der linke Rotor schneller als der rechte, fliegt der Copter nach rechts.
Um den Quadrocopter nach vorn zu bewegen, wird durch Neigung Vortrieb erzeugt. Analog zur Roll-Bewegung drehen in diesem Fall der hintere Rotor schneller als der vordere. Soll es zurück gehen, drehen die vorderen Rotoren schneller als die hinteren.
Die Gier-Bewegung bedeutet soviel wie die Drehung um die eigene Hochachse. Das heisst der Multicopter dreht sich an Ort und Stelle, dazu müssen die Drehzahlen der beiden Rotorpaare unterschiedlich sein. Drehen die linksdrehenden Rotoren schneller als die rechtsdrehenden Rotoren, dann dreht er sich nach rechts. Umgekehrt dreht sich der Multicopter nach links, wenn sich die rechtsdrehenden Rotoren schneller drehen als die linksdrehenden Rotoren.
Nebst der Steigebewegung kann der Multicopter Rollen, Nicken und Gieren und spätestens nach diesem Beitrag sollten diese Begriffe hoffentlich verständlicher sein. Die sich aufhebenden Drehmomenten der Rotoren, durch entgegengesetzte Paare ist so einfach wie genial und lässt solche Multicopter, oft auch Drohnen genannt, stabil in der Luft schweben. Das ideale Fluggefährt für Aufnahmen von oben.
Demnächst geht es hier auch wieder mit meinem Multicopter Projekt weiter, bei Fragen wie immer die Kommentarfunktion nutzen, ich helfe gerne weiter…
Im März 2010 habe ich Technikblog ins Leben gerufen. Seither blogge ich über technische Themen die mich faszinieren und im Alltag begleiten. Das sind Themen wie Gadgets, Smart Home, Elektroautos, Erneuerbare Energien und vieles mehr...





